Apollo Spacecraft Control
An investigation into different forms of attitude control.
All source code used can be found here.

TODO Full project description in progress...
Motivation
A few years after taking an advanced dynamics course at BYU, I decided to re-visit the Euler-based dynamics and controls implementations that I had done for that class's final project. After having gained additional experience creating controllers for inner attitude loops on drones, I primarily wanted to show how much more "parsimonious" the controller for this project could be. However, the second and more important purpose for re-visiting this controller was to clearly illustrate the pitfalls of Euler-based attitude control which I've found to be so commonplace in UAV autopilots. Unlike a quadrotor, which may spend most of its flight time close to a hover attitude-wise, a spacecraft will have to exercise control at just about any arbitrary attitude.
Spacecraft Model
Controlling the Spacecraft
Controller Types
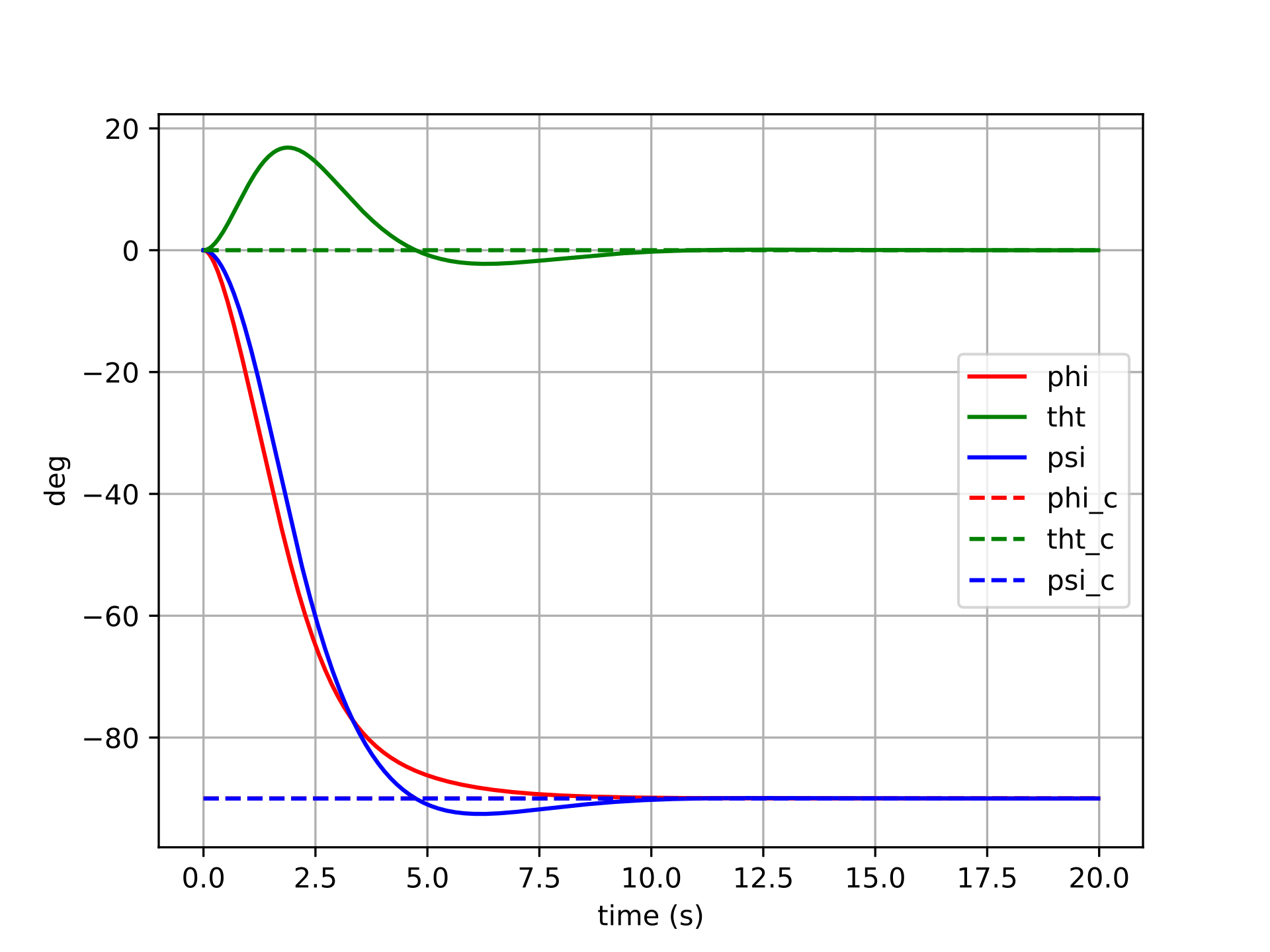
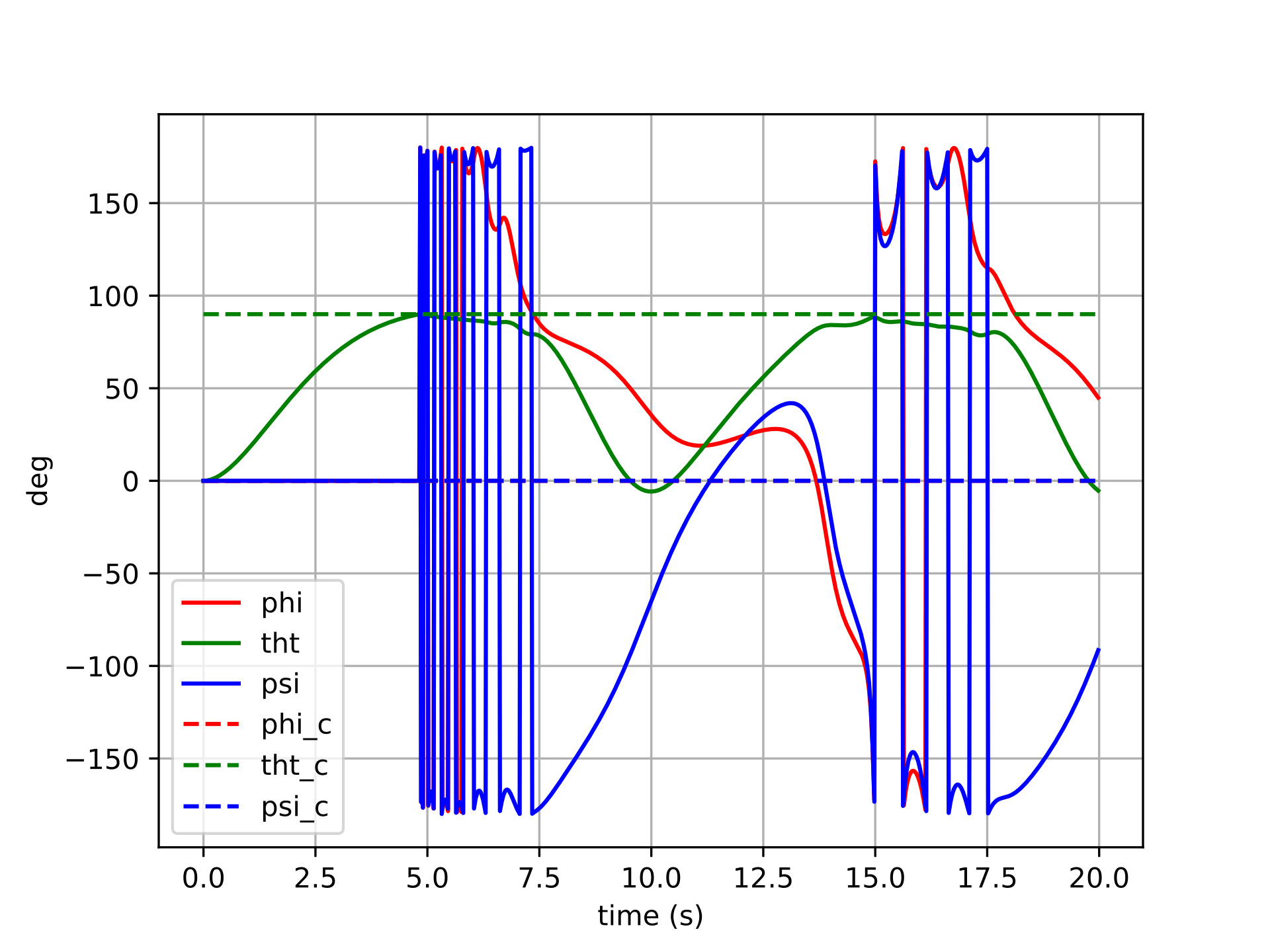
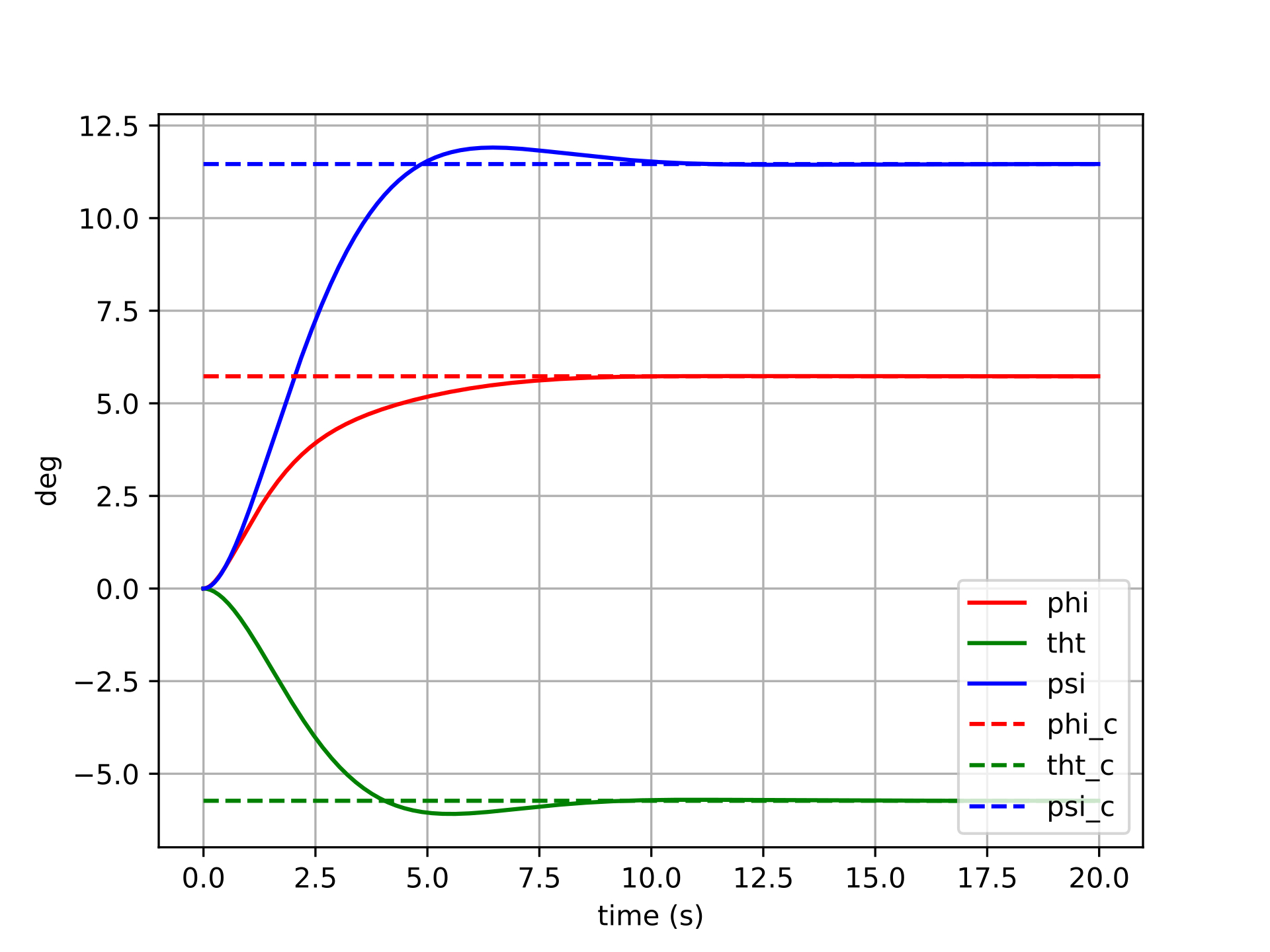
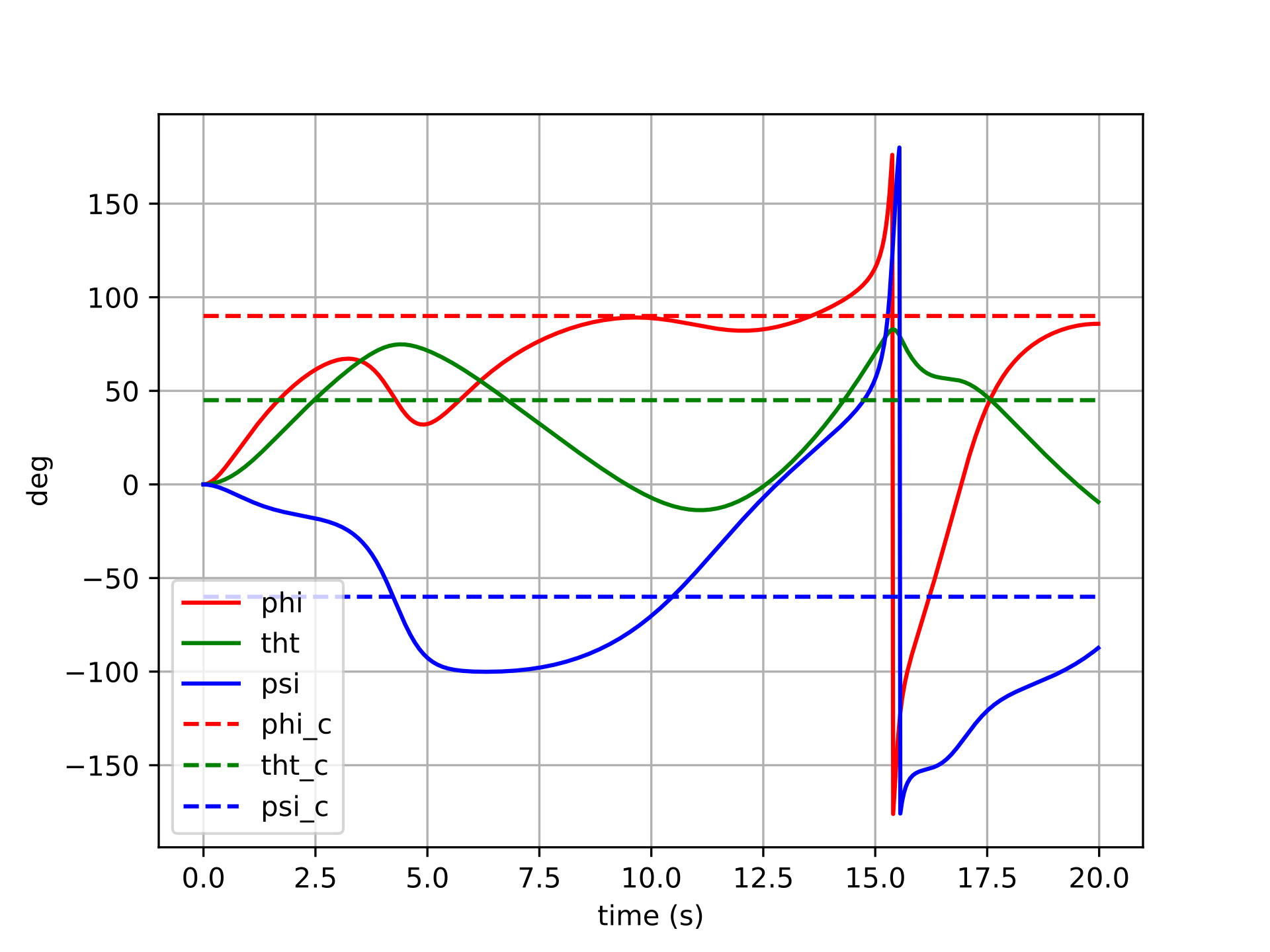
Results
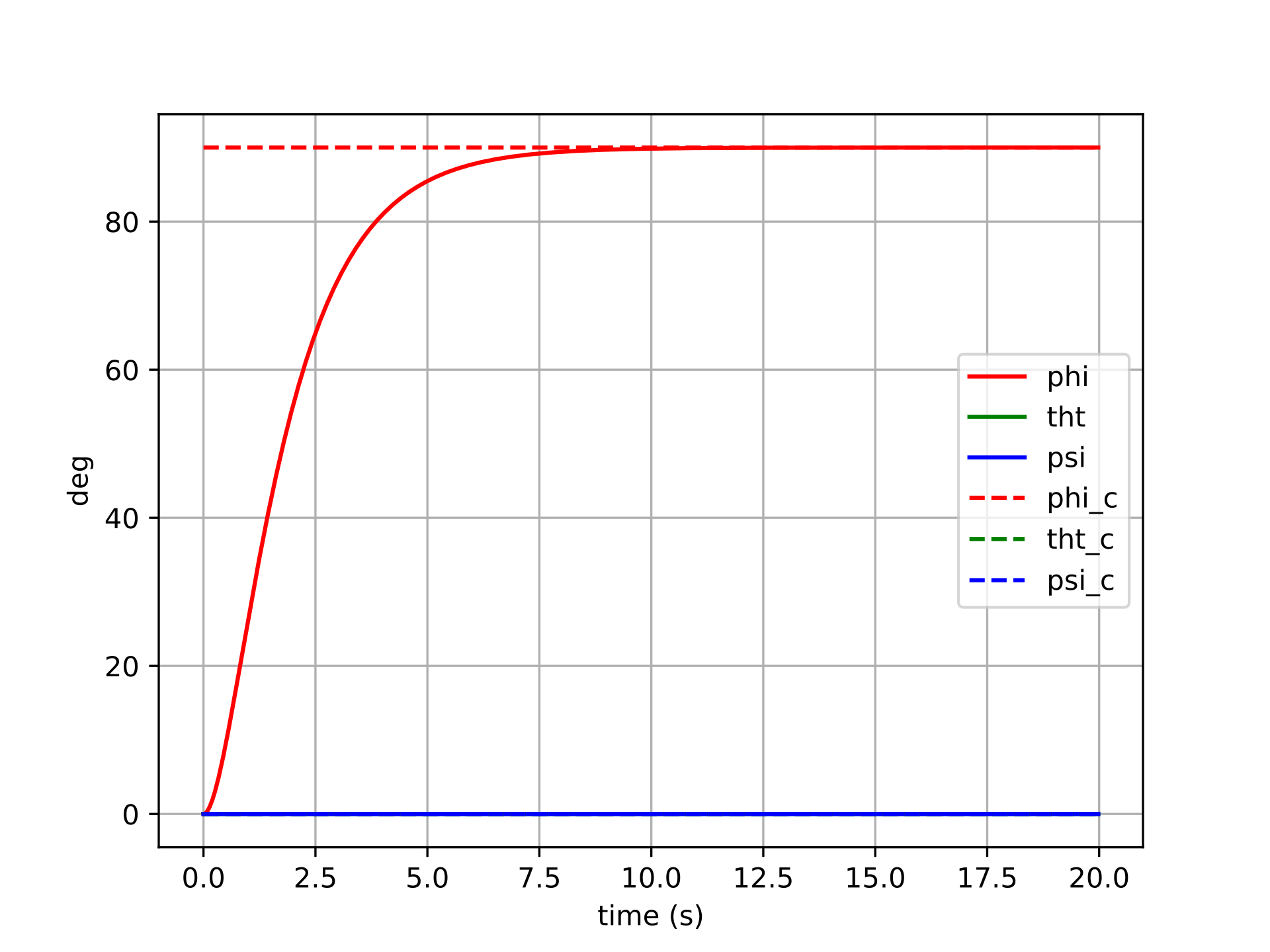
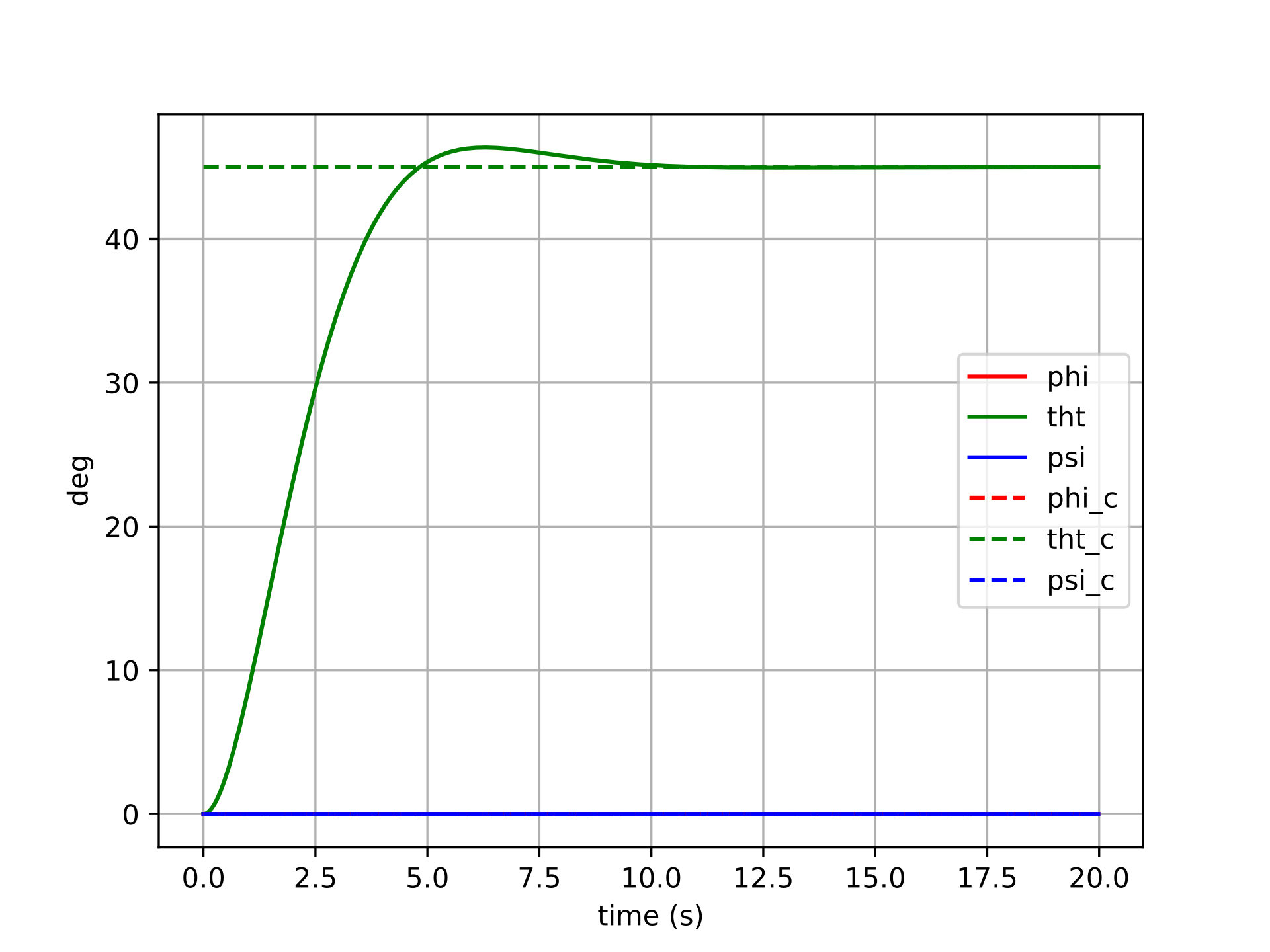
Controller with Euler Error
$$\boldsymbol{u}=-k_q\left(\begin{bmatrix}\phi-\phi_d && \theta-\theta_d && \psi-\psi_d\end{bmatrix}^{\top}\right)+\dots$$
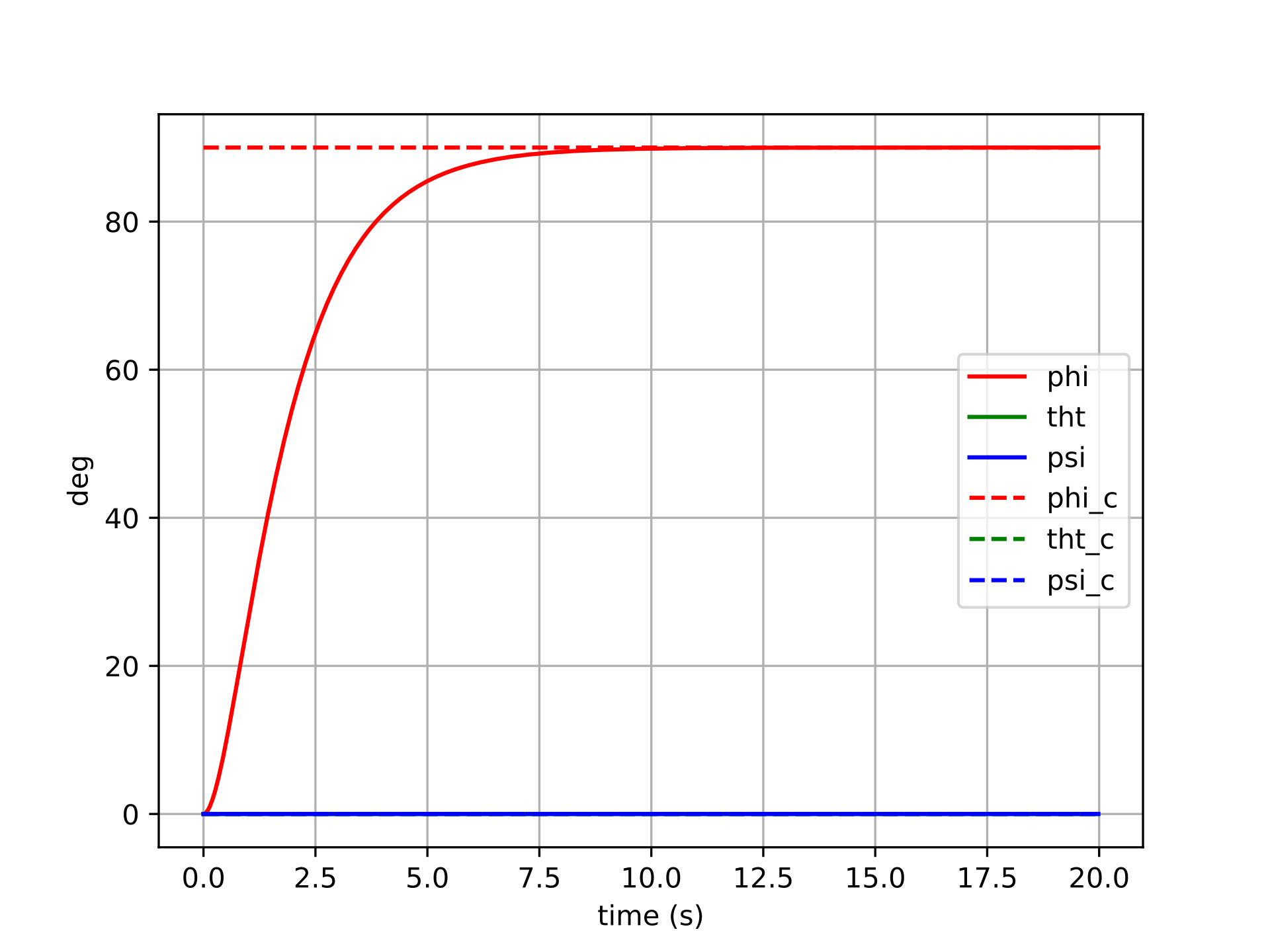
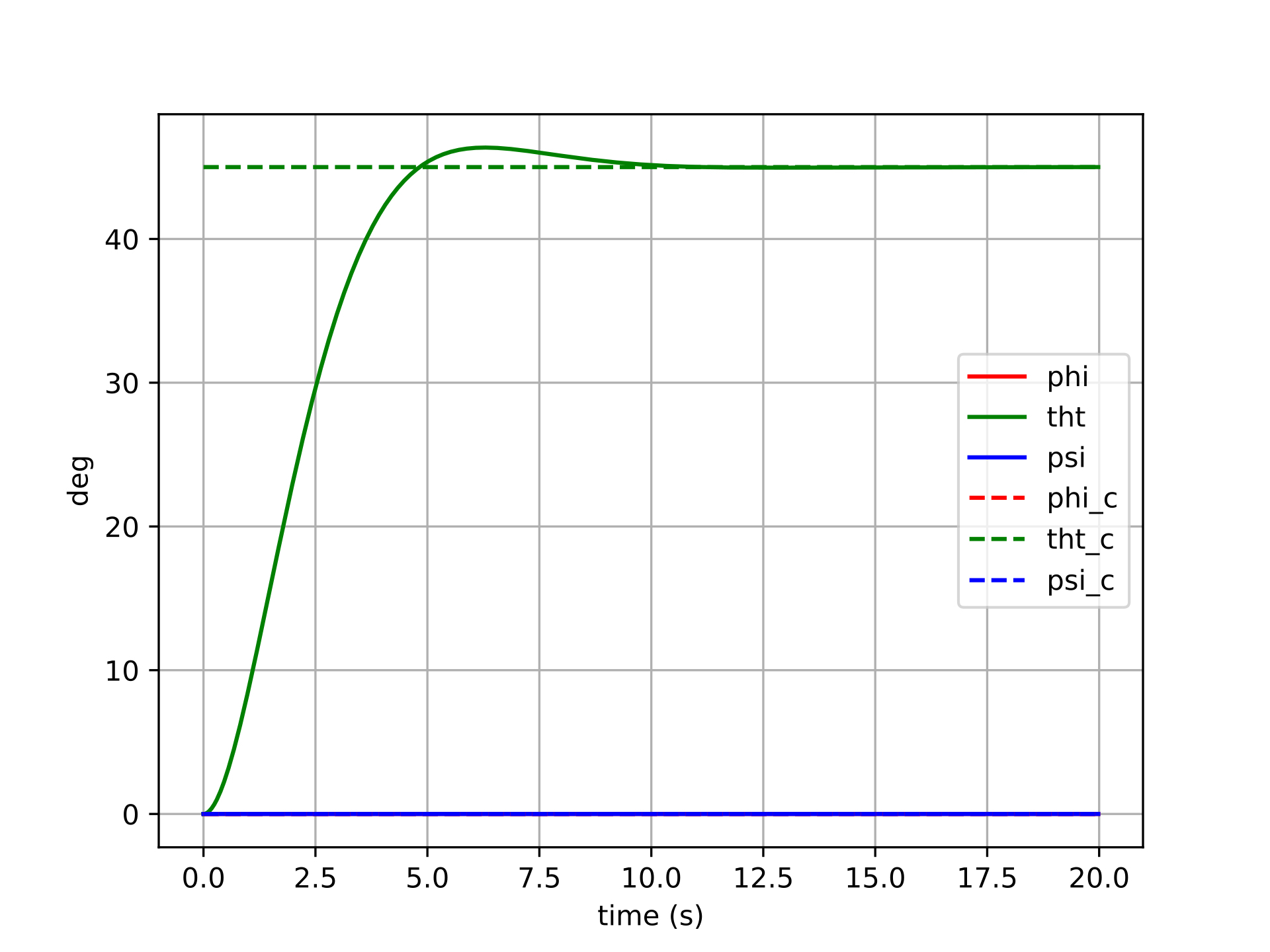
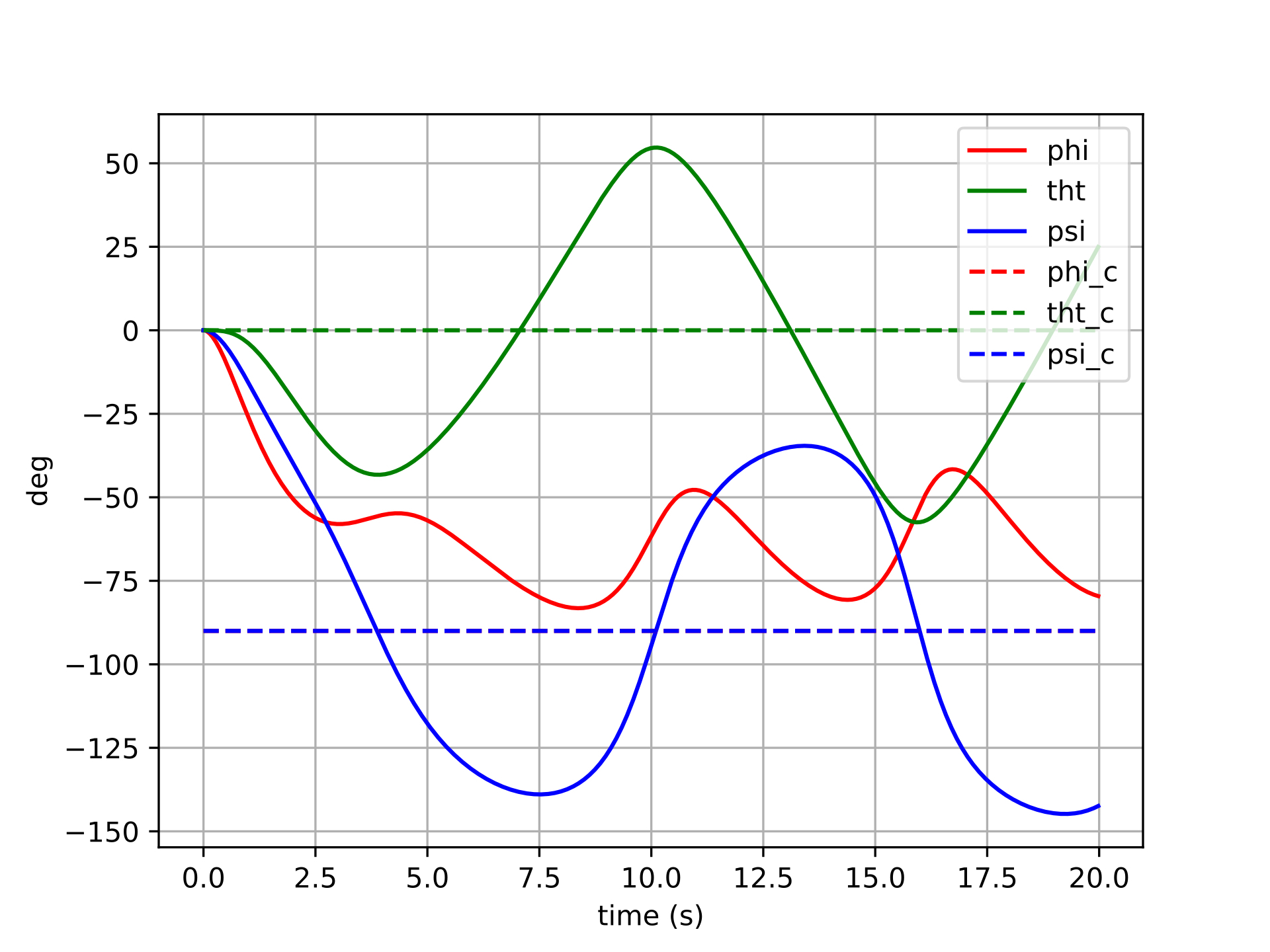
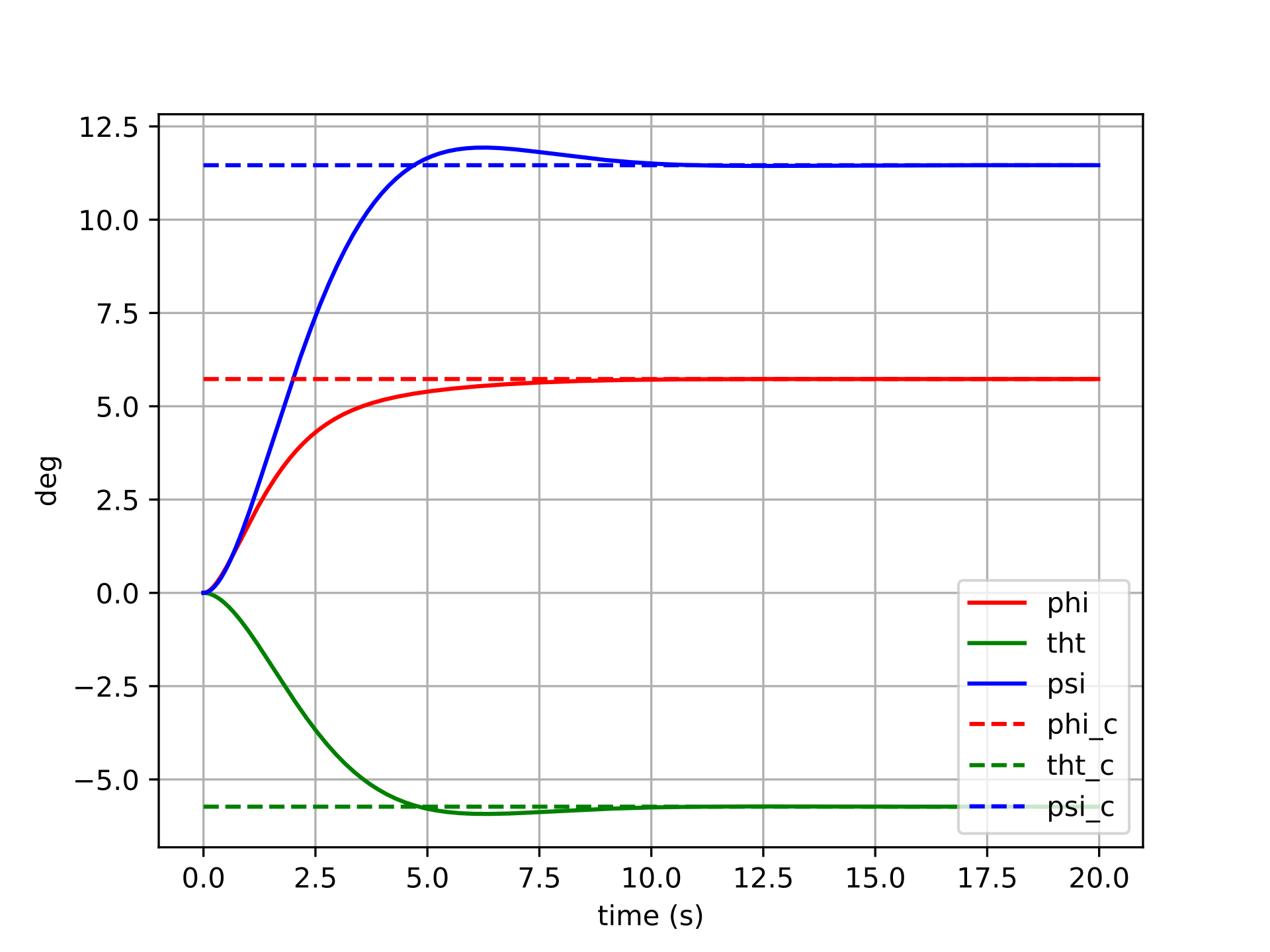
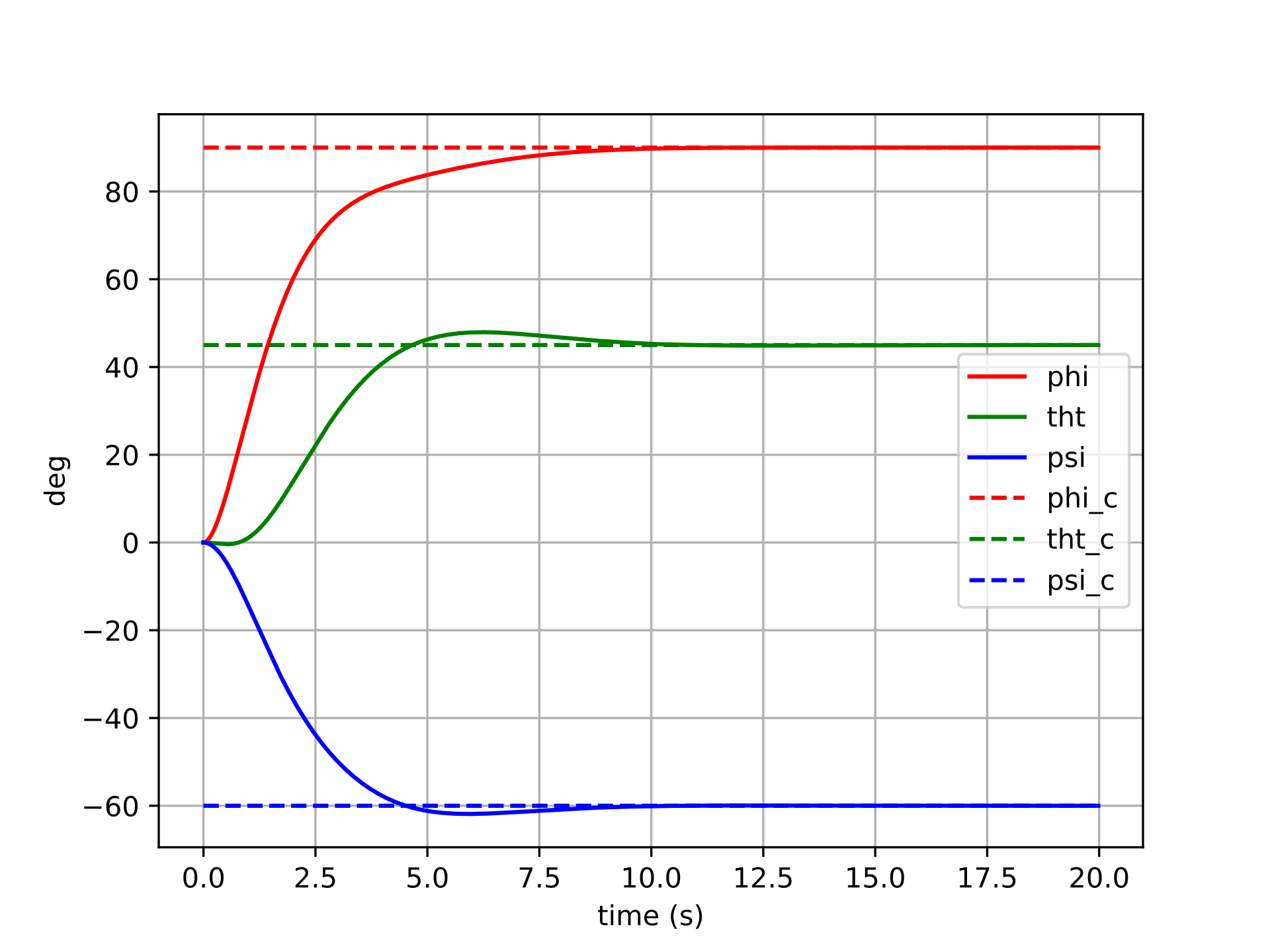
Controller with Tangent Space Error
$$\boldsymbol{u}=-k_q(\boldsymbol{q}\ominus\boldsymbol{q}_d)+\dots$$